全国服务热线:
400-816-1636
菜单

扫一扫关注公众号



长期以来,机器人都以冰冷、坚硬且全身覆盖着金属的形象示人。这种形象显然不能给人带来温情的感觉,不利于拉近与人类之间的距离。相比之下,人形机器人(又称“仿人机器人”或“类人机器人”)比那些非人形机器人更讨人喜欢。从心理层面讲,人形机器人是最容易让人接受的一个人机交互界面。它们不仅更容易被人所接受,而且因为其与人类的物理尺寸、生活习惯等兼容,可以更多地利用为人专门设计的方方面面,因而在人类世界中更得心应手。

机器人结构:使用17个数字伺服马达,其中16个MT14M 数字伺服马达;1个MT0680数字伺服马达。利用feedback位置回收,实现初始坐标补偿,使程序规划机器人时更简易快速;
机器人材质:17自由度机器人“机器小子roboy”采用的是高强度ABS塑料材质;
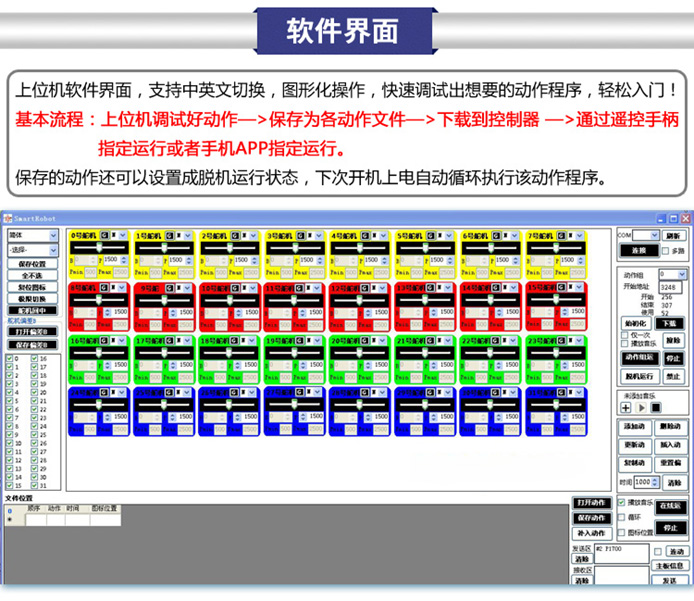
编程语言:支持C语言,汇编语言等多种语言。内嵌各种高级语言编译器;可以适应不同层次的初学者;
机器人扩展:中高阶学习者可以为该系统增加各种传感器,例如光强度传感器、集成温度传感器、声音传感器、红外传感器等,更可添加视觉系统(需单独定购)等设备参加RoboCup等机器人大赛类人组足球项目。实现机器人的高难度动作,满足高级研究者的需求。
控制驱动板:测试版本使用51单片机作为主控制器;可擦写程序万次以上,最多可控制24个servo,均支持角度、速度、加速度控制。(后续版本会升级为ARM版本)
参数
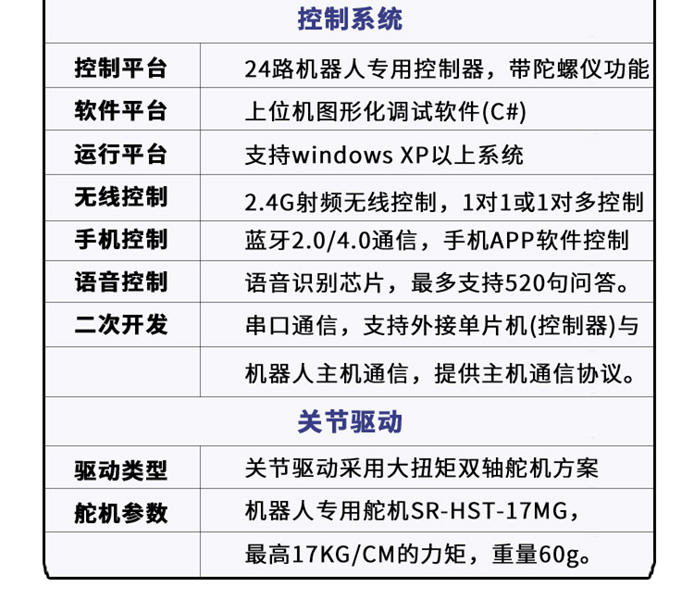
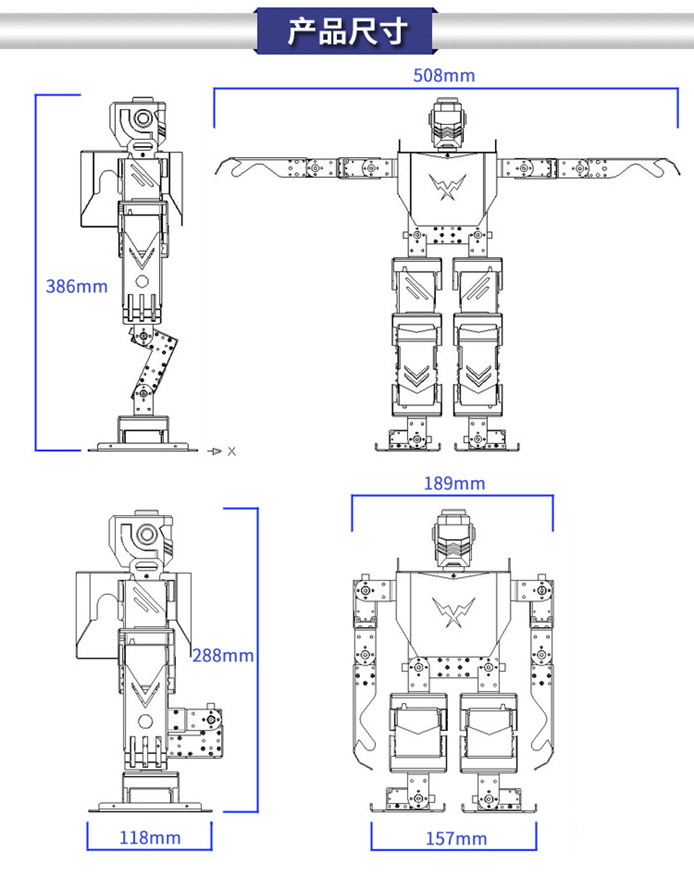
机体尺寸:高360mm,宽185mm,厚115mm
舵机参数:重量:56g;尺寸40×20×46mm;扭力14kg.cm(7.4v);速度0.18秒/60度。
产品质量:1.7kg;
应用场合:人形机器人研究、高校机器人实践创新、机器人竞赛等。
关节:共17个关节;头:1个自由度,双臂6个自由度,双腿10个自由度;
装载全新机器人专用数字舵机及24路高端机器人控制器,附专用锂聚合物充电电池及充电器。
支架结构
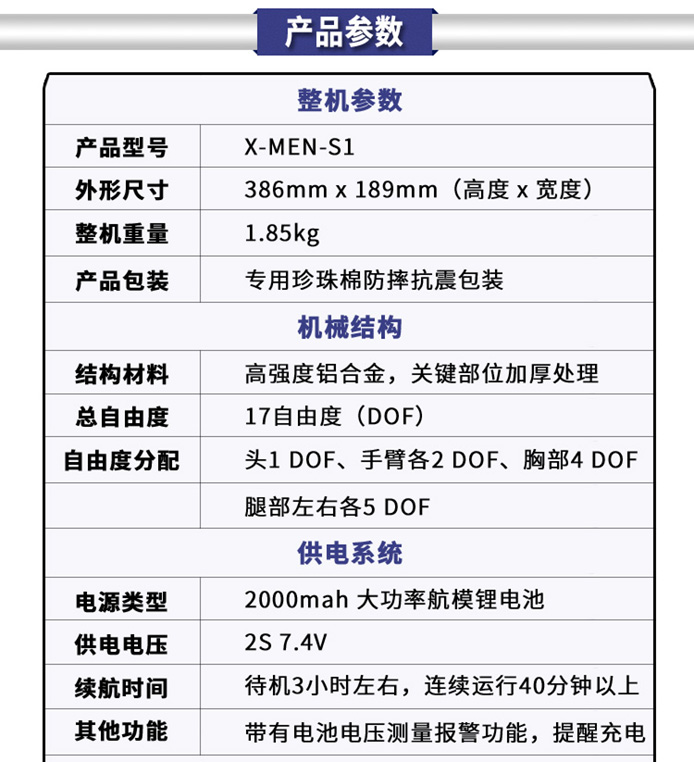
通体采用1mm厚度的硬铝合金精加工而成,部分支架做了加强边处理,使得支架不仅重量轻而且强度大。每个关节之间都是由工程师仔细设计与测量,使得机器人腿部结构更加合理。
部分支架设计成为一体化结构,极大的方便了机器人的组装,节省了时间和体力。
动力系统
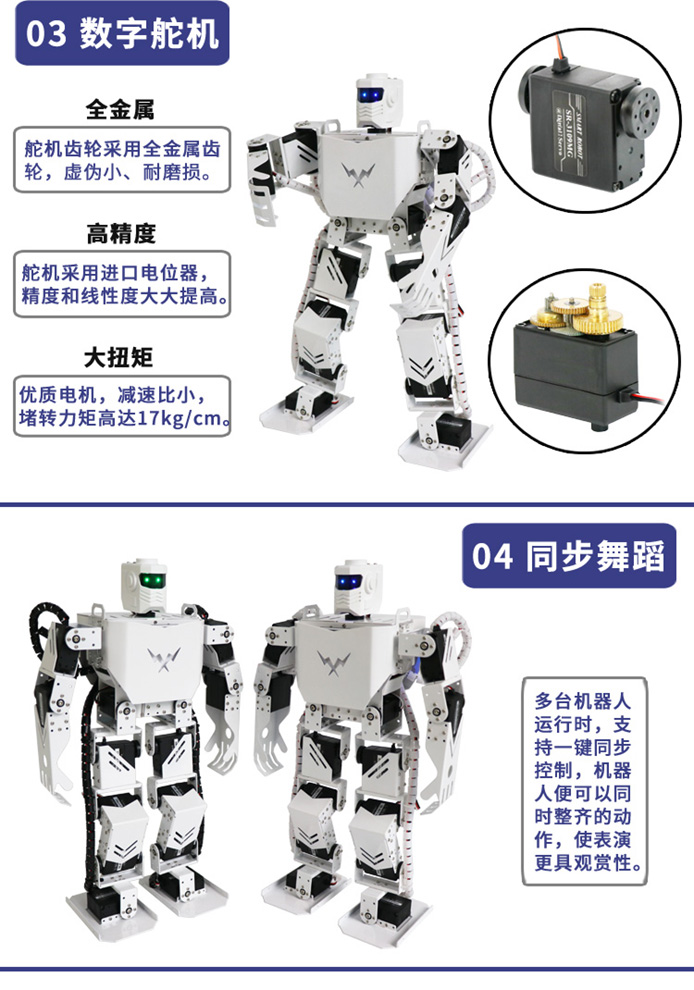
采用双轴机器人数字舵机LD-2015,此款舵机扭力大,精度高,虚位小,零死区,使得机器人的动作更加敏捷,干净利落!
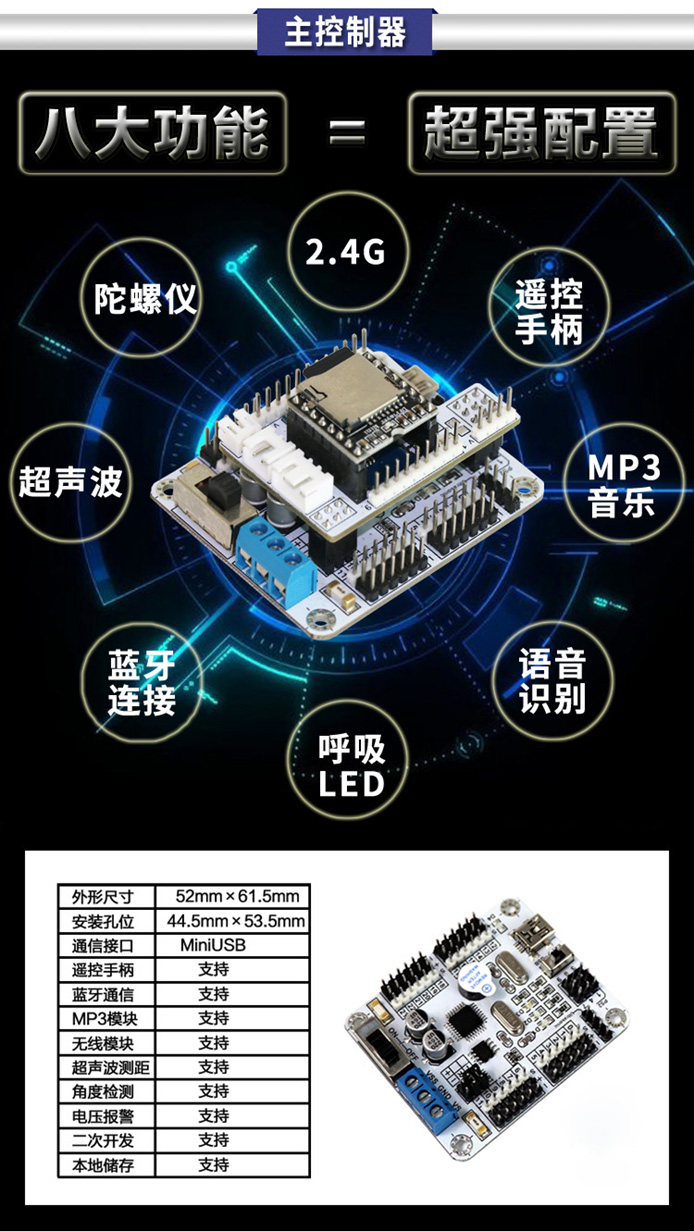
控制器
采用高端24路双足机器人控制器,带有过载保护和低压报警,可以外接传感器。软件配送,图形化编程,使得机器人的编程更加简单方便。开关内置和模式开关内置的设计,将布线的烦恼降到最低!